

作品名称基于导轨移动的柔性臂自对接智能充电机器人
作品分类智能产品
参赛院校南京工程学院
指导老师孙梦馨、郑璐恺
团队成员李胜、周杰、卢旭鸿、金煜轩、王瑶
奖项等级国赛一等奖
竞赛年份2023
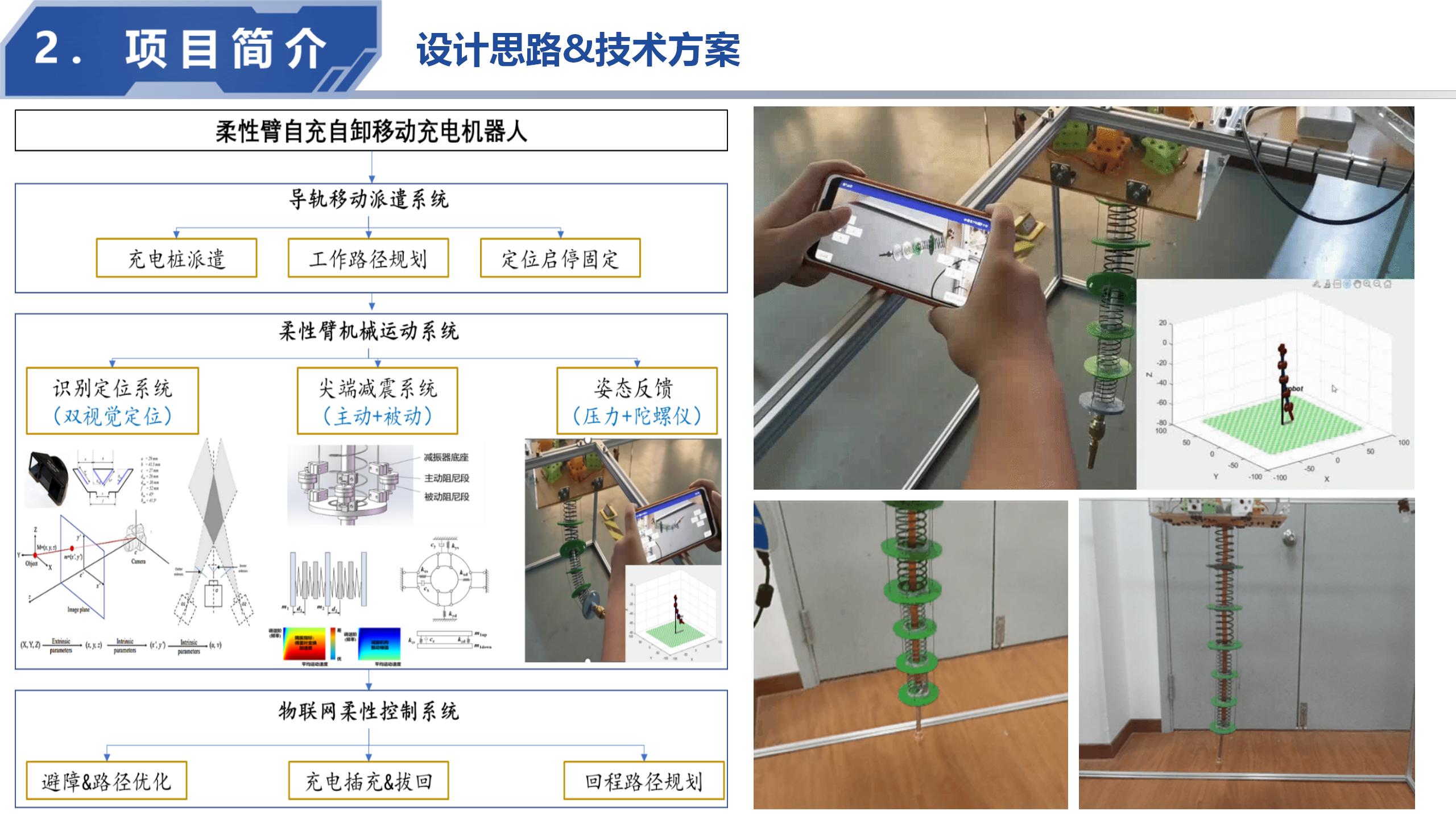
新能源汽车的推广与使用是贯彻落实国家双碳发展战略的重要部署,中国新能源汽车正在爆发式增长,充电桩建设的是行业健康发展的基础保障。然而,充电桩缺乏、利用效率低、智能化差等限制阻碍了新能源汽车的发展。本团队运用柔性臂机器人的控制、识别、定位技术,物联网技术等,开发出基于柔性臂可自充自卸智能共享充电机器人系统。具有空间适应性强、柔性臂伸缩作业灵活性高、充电接口定位精准、容差度高等特点。

 " />
" />