Toggle navigation
首页
竞赛通知
通知公告
大赛动态
新闻首页
大赛新闻
学会新闻
精彩回顾
竞赛作品
校赛申请
竞赛报名
作品管理
登录账号
退出账号
登录
您当前位置:
首页
>>
竞赛作品
>>
智能软硬件
作品首页
VR与游戏
移动应用开发
影视动漫
智能产品
人居环境
数字艺术
数据可视化
智能软硬件
微信小程序
其他
虚幻作品
科幻创意
红色之旅
乡村振兴
民族文化
AIGC类
我们的参赛作品“慧眼识牛——基于深度视觉的奶牛体况自动评分系统”运用了先进的深度学习技术,集成了奶牛目标检测、身份识别及体况评分三大功能实现
慧眼识牛——基于深度视觉的奶牛体况自动评分系统
国赛一等奖
畅视护卫-无溅水式雨刮整机系统技术开发
国赛一等奖
基于yolov8的新型智能肉鸡巡检机器人——肉鸡健康成长的守护者
国赛一等奖
随着电力需求和我国电网不断扩大,电力巡检需求也不断扩大。传统电力巡检已经无法满足市场和行业需求,电力巡检无人机市场目前十分广阔。但目前市面上巡检无人机仅仅具有拍
“高空卫士”基于深度学习与5G边缘计算的高压电力综合巡检平台
国赛一等奖
多功能水下捕捞检测机器人,可用来进行海产品如海参海螺海胆等捕获也可用于海产养殖基地观测以及大坝桥梁的检测。该水下机器人搭载全高清低延时水下专用网络相机,摄像机云
多功能水下捕捞检测机器人
国赛一等奖
爬壁机器人根据吸附形式的不同,一般可以分为负压吸附爬壁机器人和磁吸附爬壁机器人两种类型。而我们设计的爬壁机器人则采用了可靠性更高的永磁吸附方案,以此为基础进行
磁吸式爬壁机器人
国赛一等奖
本团队自主研发了高速高精度智能无线摄影测量仪,该产品由高效高精度无线照相机、带有自稳定功能的无人机和慧视APP构成。用户可以通过手机等移动智能设备,借助慧视APP,对
一“影”俱全——高速高精度智能无线摄影测量仪
国赛二等奖
本作品主要结合yolov5框架和deepsort算法,实现道路的车辆及行人的识别与追踪 ,首先将整条道路分为up车道、down车道,并在道路中间设置两条不同颜色的撞线。蓝色撞线用
在智能交通背景下的的智慧感知人车识别分类模型
国赛一等奖
本项目是一个基于端云协同的智能疲劳驾驶检测系统,项目中包含的政策数据来源于权威的部门,使用对象广泛,包括货车司机、出租车司机等驾驶人员,针对驾驶员疲劳、分神驾驶
归程守护者——基于端云协同的疲劳分神驾驶检测系统
国赛二等奖
自动绕线绘画仪,是一款主要功能为自动绘制绕线画,同时也附带自动写字、制图、平面雕刻等多种功能的智能机器人,在工作中利用机器替代人力操作,充分地发挥其自动性和柔性
自动绕线绘画仪
国赛二等奖
市场上急需一种能够探索危险环境的球形勘测机器人,可以全向翻转,运动平稳,能灵活探索人们难以进入或危险的地方;并且这种新型机器人能够克服已有的球形机器人存在的问题
无界行者—海胆精灵
国赛一等奖
“佳易分”是一款专注于城市生活、文化教育领域的创新科技产品。它配备了高分辨率摄像头和传感器,利用图像识别算法能够自动识别并准确分类投放的垃圾,从而有效
佳易分-智能生活小帮手
国赛一等奖
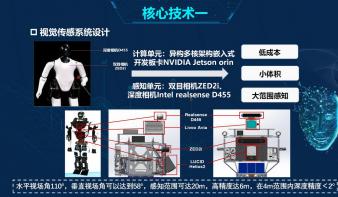
自21世纪以来,海洋资源的勘探和开发已成为一个新兴的热点领域。随着人工智能前沿技术的迅猛发展,将AI技术与海洋开发相结合已成为必然趋势。水下机器人作为海洋探索和保护
深海密语——海洋勘测系统
国赛一等奖
项目“基于YOLO-UNET的视觉道路智导系统”旨在为无人驾驶和智能交通系统提供准确、高效的道路与交通标志识别。该项目整合了YOLOv5-7.0模型与UNET技术,并用Pytor
基于YOLO-UNET的视觉道路智导系统
国赛二等奖
具体请见邮件附件,谢谢。
稳中求“精”— 基于运动消抖与楼梯感知的智慧仿人机器人
国赛二等奖
针对目前手语翻译装置的识别准确率低、识别速度慢、依赖网络、装备笨重、故障率高、实用性差、无法普及的问题,本作品应用基于边缘计算人工智能张量处理器TPU、大数据处
MetaThroat-基于边缘计算AI TPU、YOLOv4-SPP及多传感器融合技术的手语实时翻译系统
国赛二等奖
智慧物联餐厅系统中,消费者在从机端点餐支付后,菜单信息通过Mesh组网上传至餐厅经营者的主机端。同时,主机网关通过物联网上传菜单及餐厅实时信息至云端,在云端进行数据
基于华为云、Mesh组网及边缘AI的智慧物联餐厅
国赛一等奖
该设备的系统安装在车载中控电脑上,该系统集成了小型检测设备放置安全带中,通过蓝牙模块与车载中控电脑连接,利用该设备中的健康检测模块收集驾驶者的身体健康信息,传递
交通卫士——智能车载监测预警系统
国赛二等奖
本项目研究设计一种行道树喷白机器人,该机器人系纺具有超声被、Arduino 控制板、蓝牙等模块组成。该机器具有对行道树的树木倾斜角以及树木与机器之间的距离的测量、感知树
行道树喷白机器人
国赛二等奖
本消毒系统针对传统消毒产品存在的安全监管难题,应用人工智能、大数据、物联网技术开发了一种多重自主感知人体的高可靠安全消毒系统,可实现消毒的安全和高效。系统开发基
“自感精灵”—基于多传感物联的安全智慧消毒机器人
国赛一等奖
公众号
回到顶部
















 " />
" />